

We’ve built the touch layer for the robotics stack.
Dexterous manipulation requires more than vision and motion control—it requires real-time spatial contact awareness. Our patented fabric sensors capture pressure, direction, and texture across any robotic surface with millimeter-scale resolution.
Battle-tested and built for contact with the real world.
Our systems build on piezoresistive sensing technology with millions of deployed sensors across multiple markets and decades worth of cycles. We won’t make you sacrifice dynamism for durability.
Drilling for Data?
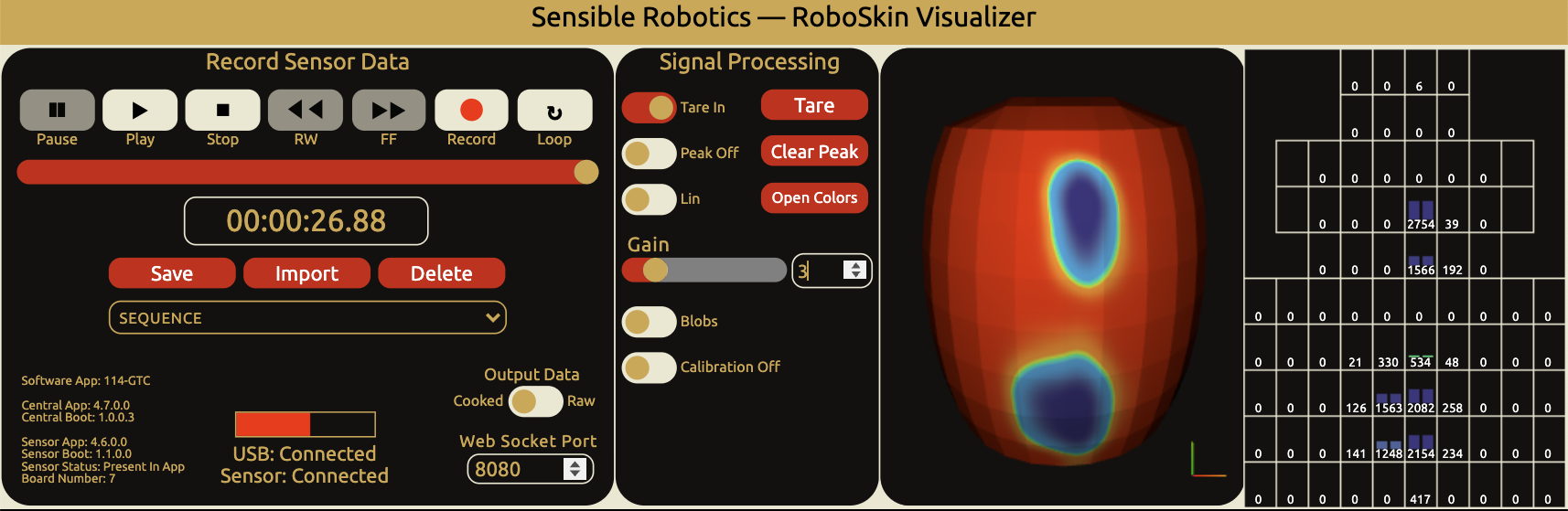
If there is a 100,000 year data gap in robotics, at least half of that is manipulation data. We’ve built a data studio to help you visualize and record your robot training data so you can focus on training and not managing your data pipeline.
Capabilities:
Resolution: 80 taxels at ~2mm pitch
Sensor force range: <0.1 N to 100N
Dynamic Range: +80dB
Transient response: > 60dB/ms
Data output: 12-bit
Sample rate: Up to 1kHz single sensor
Durability: Tested to 1M cycles
Power: 10mA - 15mA @ 5V
Communication: I2C, SPI, USB, UART, CAN